
Robot-navigation Datasets
PATCH DATASET
License
Licensed under Creative Commons BY-NC-ND 4.0.
Description
This dataset was collected by taking images with a resolution of 416×416, with the Kinect for Windows device, and applying a 26×26 grid over it, resulting in 16×16 pixels cells. These cells were labeled with a representative class. Each cell was cropped out and according to their label they were put in a folder of the same name. It contains 4 classes, thus 4 folders: Background (smooth cement surface), Jaguar (4X4 Jaguar Platform), Red (red rectangle) and Blue (blue rectangle). Since these are small patches of the 416×416 image each 16×16 pixels patch can represent only a small part of the overall object (i.e. a cropped patch could be representing only the claw of the 4X4 Jaguar Platform, regardless of the component of the platform or of the other classes they were labeled according to the overall object).
This dataset was built for networks that can perform a form of semantic segmentation and it is comprised of: 423 Background images, 1096 Jaguar images, 261 Red images and 441 Blue images. All images are denoted by their class name and the time at which they were taken in seconds since the Unix epoch.
Download Patch dataset (pass: navigation)
YOLO DATASET
License
Licensed under Creative Commons BY-NC-ND 4.0.
Description
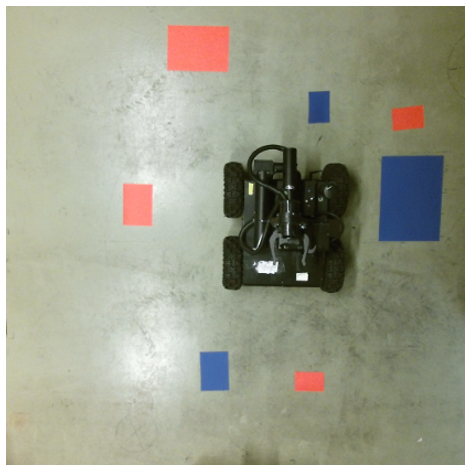
The dataset is represented by images containing 3 classes: Red (red rectangle) , Blue (blue rectangle) and Jaguar (4X4 Jaguar Platform by Dr Robot). There are 100 images that contain these objects and 100 XML files that represent the annotations for the bounding boxes that encapsulate the objects. The annotations were created with the help of the IBM Annotation Tool.
The images are colored and have a resolution of 416×416. They were taken with the help of the camera provided by the Kinect for Windows device. All images are denoted with numbers from 1 to 100.
Download Yolo dataset (pass: navigation)